On-Board Optical Analysis for Soil Samples
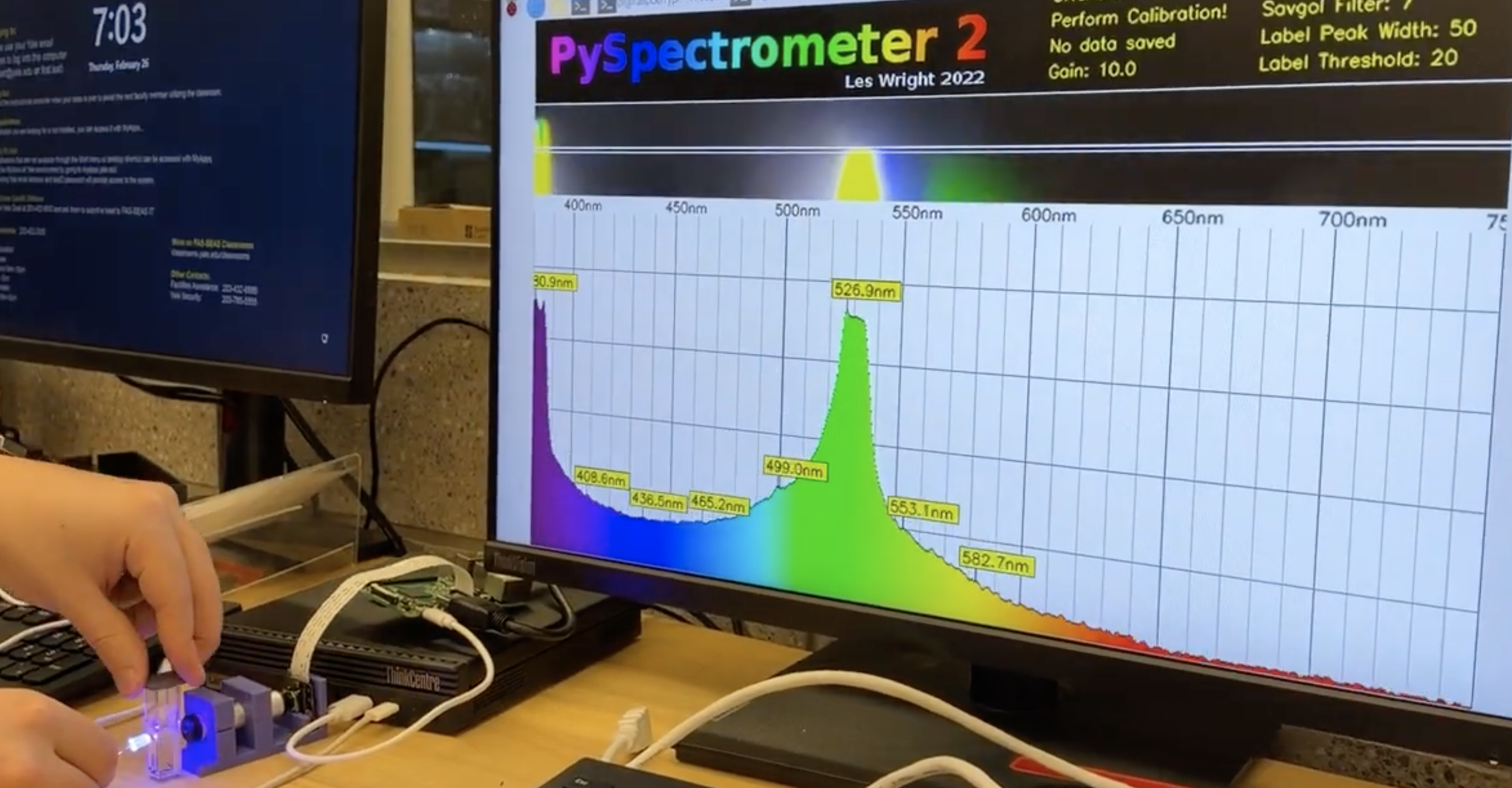
I designed and built a compact custom spectrometer that allows the rover to analyze up to three separate soil samples for chemical signatures associated with biological life activity. The goal was to perform on-board optical testing with minimal power consumption and without relying on external laboratory equipment — a hard constraint for a rover competing under strict weight and budget limits.
The system uses a Raspberry Pi camera with its IR filter removed to extend spectral sensitivity beyond the visible range. Incoming light from each sample passes through a diffraction element positioned at 47° to split it into component wavelength bands captured by the camera sensor. A custom rack-and- pinion linear actuator cycles through three sample cuvettes, positioning each one into the optical path sequentially without disturbing the measurement environment.
The entire device is housed in a light-sealed 3D-printed enclosure to eliminate ambient light contamination and ensure measurement consistency across different ambient lighting conditions during competition.
// what I did
- Designed the full spectrometer housing with a controlled, light-sealed optical pathway
- Integrated a Raspberry Pi camera with IR filter removed to maximize spectral sensitivity
- Positioned a diffraction element at 47° to decompose incoming light into wavelength bands
- Designed and built a rack-and-pinion linear actuator to cycle through three sample cuvettes
- Developed CAD models for internal mounts, guides, and optical alignment hardware
- Ensured the housing is light-tight and mechanically rigid for consistent, repeatable readings
- Applied Fourier decomposition methods for spectral data processing and analysis
Built from Constraints
Every component choice in this spectrometer was driven by the rover's resource constraints. Off-the-shelf spectrometers cost thousands of dollars and weigh far too much for integration into a competition rover. This device was designed to be manufacturable for under $200 using parts sourced from robotics suppliers and 3D-printed structural components.
The rack-and-pinion sample stage was chosen over a servo-driven turntable because it provides precise, repeatable linear positioning without backlash — critical for keeping each cuvette aligned with the optical axis during measurement. The diffraction geometry at 47° was selected through iterative ray-tracing analysis to produce the widest usable spectral spread across the camera sensor.